SERVO CV POUR
ANTENNE LOOP MAGNETIQUE
par ON7NU
Le but de cet article n'est pas de décrire le montage complet d'une antenne magnétique dont on trouve suffisamment de description sur le Web.
Après avoir déjà réalisé plusieurs antennes loop magnétique, j'ai constaté que la réalisation du condensateur variable, n'est pas chose aisée.
La réalisation mécanique demande beaucoup de précision et en cours d'utilisation, le réglage du R.O.S. est très pointu et demande pas mal de dextérité.
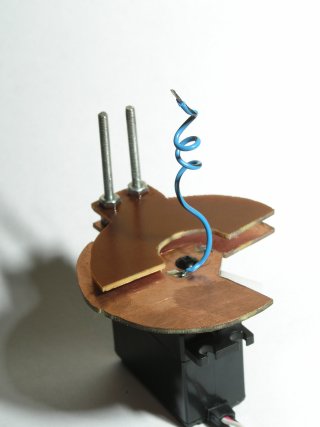
Voici un CV monté directement sur l'axe d'un servo-moteur pour modélisme.
L'asservissement permet de régler de façon précise l'accord de l'antenne sans passer en émission.
Il est même possible de réaliser des présélections en fonction de la fréquence. Ces avantages sont encore plus accentués si l'antenne est une mono bande.J'ai donc placé une grande capacité fixe en utilisant la capacité d'un coax type RG59 et une petite capacité variable permettant de couvrir un peu plus que la bande des 40 m.
Un servo moteur travaille en PWM ( "Pulse-width modulation", Modulation en largeur d'impulsion).
Il faut envoyer toutes les 20 millisecondes (valeur non critique) un signal d'une durée comprise entre 0.5 et 2 msec.
C'est la durée de cette impulsion qui commande la position du moteur, donc, l'angle de rotation du C.V.
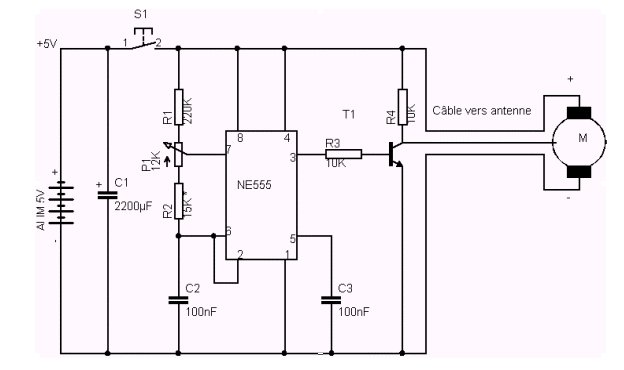
Dans cette application je génère les impulsions à l'aide d'un timer du type NE555, la position du CV est donc télé-commandée par un potentiomètre depuis le shack. Il est aussi possible de le commander via port série d'un PC ou via un micro contrôleur.
Je n'ai pas encore écrit le soft, mais il est possible que si je trouve le temps, cela tournera sur PIC 16F84 ou équivalent. Arduino ...
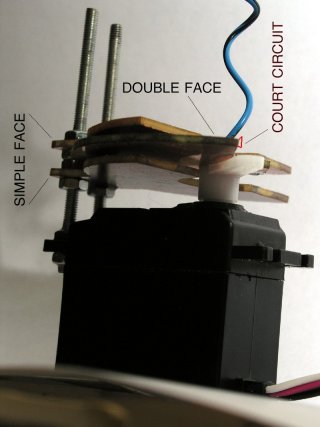
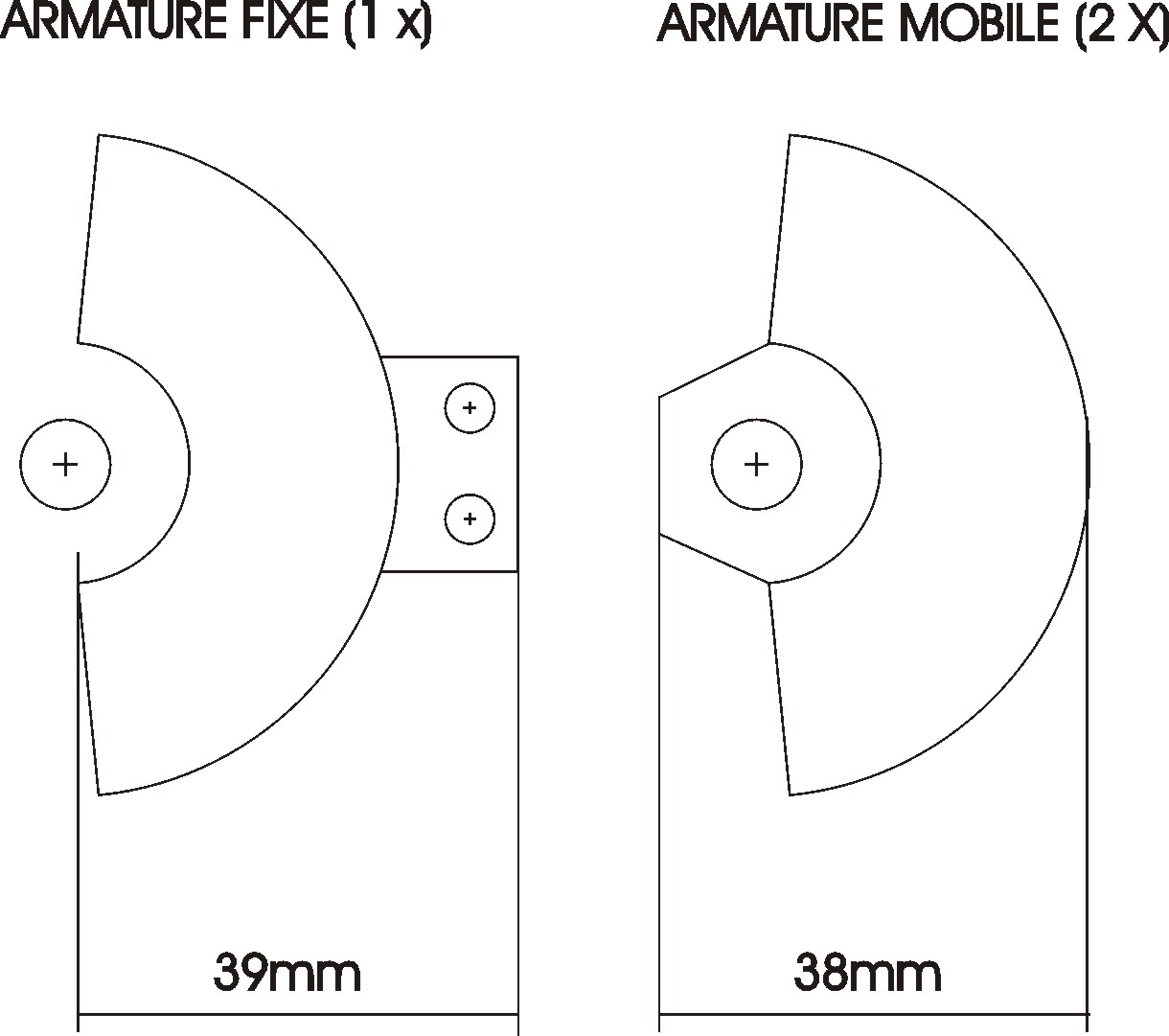
Les armatures fixes sont attaché au moteur à l'aide de deux tiges filetées de 3mm. L'espacement entre les plaques est déterminé par une épaisseur d'écrou. La pratique m'a démontré que cet espacement offre une isolation suffisante pour pouvoir travailler avec une puissance de 100 W.
L'armature mobile est fixée sur l'axe à l'aide d'une tige nylon livrée avec le servo, ainsi que la vis axiale.
Electronique
Un servo-moteur est composé de trois fils : généralement un noir pour le (-), un rouge pour le (+ 5V), et une autre couleur pour l'entrée des impulsions de commande.
La surface des armatures, l'écartement de celle-ci et l'électronique ci dessous, permet de couvrir sans problèmes, la bande des 40 m. Pour une bande plus large, il faudra peut être ajouter une paire d'armature (à expérimenter).
Condensateur fixe
Enrouler du coax RG59 sur un tube de PVC. Une extrémité de ce coax reste ouverte.
Veiller à ce que aucun brin de masse ne soit proéminent afin de minimiser le pouvoir des pointes car il y a de la haute tension en ce point.
Le coax est tenu en place par de la colle à chaud (pistolet). Prévoir une longueur plus élevée que necéssaire afin de pouvoir réduire par la suite.
L'autre extrémité du coax est dénudée et connectée en parallèle sur le condensateur variable.
Réglage
P1 est un potentiomètre linéaire.
- Régler P1 afin de positionner le condensateur variable de façon à être presque totalement ouvert.
La valeur de R2 peut être changée afin de modifier la plage d'action de P1.
- Régler l'émetteur sur 7,99MHz.
- Couper le coax bobiné afin d'obtenir le bon R.O.S. la valeur de la capacité fixe est alors déterminée.
- Régler l'émetteur sur 7,01 MHz et tourner P1 afin de vérifier si le condensateur variable couvre bien toute la bande.
- Placer un trait au marqueur sur le boîtier pour déterminer la position du potentiomètre tout les 10KHz.
Faire une photo numérique afin de dessiner à l'ordinateur la face avant du boîtier et les positions du potentiomètre, et imprimer
sur feuille transparente.
Position Tracée au marqeur.

Dessin définitif
N.B. Il est impératif de monter le switch après le condensateur de découplage, car ce switch va servir à couper les impulsions et l'alimentation du moteur
dès que la bonne position est obtenue (la coupure n'est pas brutale si le switch est placé avant).
Cela permet en réception de ne pas se faire perturber par les flans raide des impulsions générées par le NE555, mais aussi en émission, éviter de perturber le servo moteur et garantir qu'il maintienne sa position., En modélisme le servo doit rester alimenter afin qu'il garde sa position mais ici, il n'y a pas de contraintes mécaniques extérieures et la boîte de réduction est telle que l'axe du servo ne rique pas de bouger en absence d'alimentation.
Il est évident que le tuning doit se réaliser avec un minimum de puissance de sortie, afin de ne pas perturber le servo moteur, mais surtout et aussi pour
ne pas perturber les autres OM ! Ham Spirit oblige, L'avantage de cette technique, c'est que la durée du tuning est très courte voir inexistante vu la
présélection réalisée par le potentiomètre.
Capacité fixe
Après avoir enroulé le coax, la capacité était encore insuffisante, j'ai alors enroulé une deuxième couche et connecté en parallèle sur le premier coax.
Ici seule la capacité du coax est exploitée. Il y a bien une composante inductive vu le bobinage, mais elle n'est pas gênante.

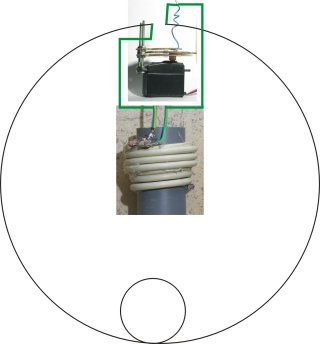
Réalisation
L'ensemble est réalisé sur base de tube de PVC pour décharge des eaux. Le tube vertical est d'un diamètre de 40mm, et la partie supérieure qui enferme
les condensateurs est d'un diamètre de 90mm. Les parties inférieures et supérieures du tube de 90mm sont fermées à l'aide de bouchons de visite.
Pour accéder aux condensateurs, il suffit donc de dévisser le bouchon. et l'autre au dessous, afin de solidariser l'ensemble (bouchon de 90mm/tube de 40mm).
Le croisillon est réalisé à l'aide de deux raccords en 'T' dont j'ai scié en deux la partie droite. Il suffit de coller les deux manchons et de
placer les deux bras horizontaux de 40mm.
Le grand cercle est constitué d'un coax d'un blindage annelé de type 7088, tout autre conducteur de cuivre de bon diamètre peut convenir.
Les deux bras maintiennent le cercle par deux serre câbles. Le câble d'alimentation du servo-moteur (3 conducteurs) est tiré dans le tube vertical de 40mm.


Il est toujours envisageable de réaliser le servo condensateur pour une capacité plus importante en ajoutant des armatures et profiter ainsi d'un usage multi-bande.
La précision du servo devrait probablement être suffisante. Mais là c'est à vous de jouer!
J'espère que ceci donnera envie de réaliser ce montage, à vos fers à souder!
73's et bon trafic en 40 m ou sur les autres bandes !
